欢迎加入Air530/G1模块技术交流QQ群:967368887
@[TOC]
1. 模块整体说明
Air530模块是一款高性能、高集成度的多模卫星定位导航模块。体积小、功耗低,可用于车载导航、智能穿戴、无人机等GNSS定位的应用中。而且提供了和其他模块厂商兼容的软、硬件接口,大幅减少了用户的开发周期。
模块支持GPS/Beidou/GLONASS/Galileo/QZSS/SBAS。采用了射频基带一体化设计,集成了DC/DC、 LDO、 LNA、射频前端、基带处理、32位RISC CPU、RAM、FLASH存储、RTC和电源管理等功能。提供超高的性能,即使在弱信号的地方,也能快速、准确的定位。
2. 资料下载
调试工具_naviTrack_v1.5.2_170720.rar
3. 模块性能
| 类别 | 指标项 | 典型值 | 单位 |
|---|---|---|---|
| 定位时间 [测试条件1] | 纯硬件冷启动 | 27.5 | s |
| 定位时间 [测试条件1] | 纯硬件热启动 | <1 | s |
| 定位时间 [测试条件1] | 纯硬件重新捕获 | <1 | s |
| 定位时间 [测试条件1] | 软件辅助A-GNSS(秒定位) | <5 | s |
| 灵敏度 [测试条件2] | 冷启动 | -148 | dBm |
| 灵敏度 [测试条件2] | 热启动 | -162 | dBm |
| 灵敏度 [测试条件2] | 重新捕获 | -164 | dBm |
| 灵敏度 [测试条件2] | 跟踪 | -166 | dBm |
| 精度 [测试条件3] | 水平定位精度 | 2.5 | m |
| 精度 [测试条件3] | 高度定位精度 | 3.5 | m |
| 精度 [测试条件3] | 速度精度 | 0.1 | m/s |
| 精度 [测试条件3] | 授时精度 | 30 | ns |
| 功耗 [测试条件4] | 捕获电流值@3.3v | 42.6 | mA |
| 功耗 [测试条件4] | 跟踪电流值@3.3v | 36.7 | mA |
| 工作温度 | -35℃- 85℃ | ||
| 储存温度 | -55℃- 100℃ | ||
| 湿度 | 5% - 95% |
注:以上结果为GPS/北斗双模工作模式
[测试条件1]: 接收卫星个数大于6,所有卫星信号强度为-130dBm,测试10次取平均值,定位误差小于10米。
[测试条件2]:外接LNA噪声系数0.8,接收卫星个数大于6,五分钟之内锁定或者不失锁条件下的接收信号强度值。
[测试条件3]:开阔没有遮挡环境,连续24小时开机测试,50%CEP。
[测试条件4]:接收卫星个数大于6,所有卫星信号强度为-130dBm。
4. 模块管脚分配
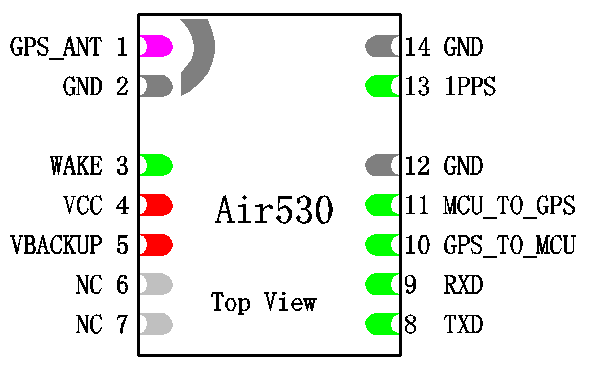
| Pin脚编号 | Pin脚定义 | Pin脚描述 |
|---|---|---|
| 1 | GPS_ANT | GPS天线输入 |
| 2 | GND | 地 |
| 3 | WAKE | 保留管脚,保持悬空 |
| 4 | VCC | 主电源,2.8V-4.2V |
| 5 | VBACKUP | 如果要支持热启动,在模块关机时也必须维持VBACKUP的供电, 后备电池的电压范围是2.8V-3.3V, VBACKUP必须要有供电,否则模块不工作; 如果不接后备电池,请把VBACKUP和VCC接在一起; |
| 6 | NC | 保留管脚,保持悬空 |
| 7 | NC | 保留管脚,保持悬空 |
| 8 | TXD | 串口TX(2.8V),输出GPS NMEA0183 数据, 默认波特率是9600bps |
| 9 | RXD | 串口RX(2.8V) |
| 10 | GPS_TO_MCU | 保留管脚,保持悬空 |
| 11 | MCU_TO_GPS | 保留管脚,保持悬空 |
| 12 | GND | 地 |
| 13 | 1PPS | 授时管脚,One pulse per second(2.8V) |
| 14 | GND | 地 |
5. 参考设计电路
参考电路:最简模式

设计注意事项
- VCC供电电压范围2.8-4.2V,VBACKUP供电电压范围2.8-3.3V。如果要支持GPS热启动功能,在关闭VCC供电的时候要保持给VBACKUP一直供电。
- 模块尽量靠近GPS天线放置,天线走线保持50欧姆阻抗匹配,走线尽量短,避免锐角。
- GPS 天线推荐使用25X25X4mm 尺寸的陶瓷天线。
- 串口TXD,RXD是 2.8V TTL 电平,用户可用此串口接收定位信息数据和软件升级。
- 本模块是温度敏感设备,温度剧烈变化会导致其性能降低,使用中尽量远离高温器件与大功率发热器件。
6. GPS天线
GPS天线可根据需要选择无源天线或有源天线,有源天线相比无源天线效果好,但是成本高。
6.1 无源天线
如果采用无源天线,建议天线与模块之间的走线尽可能的短,最理想的情况是GPS模块直接放置在天线的背面,使模块的天线焊盘和GPS天线馈点之间零距离,如下图所示:
6.2 有源天线
采用有源天线时要注意有源天线的供电电压范围,如果有源天线的供电要和模块的供电共用一个电源的话,需要串接一颗47nH的电感,同时在靠近天线处并联一颗1000pF的电容,模块内部已经有隔直电容,外部无须再加。
参考电路如下: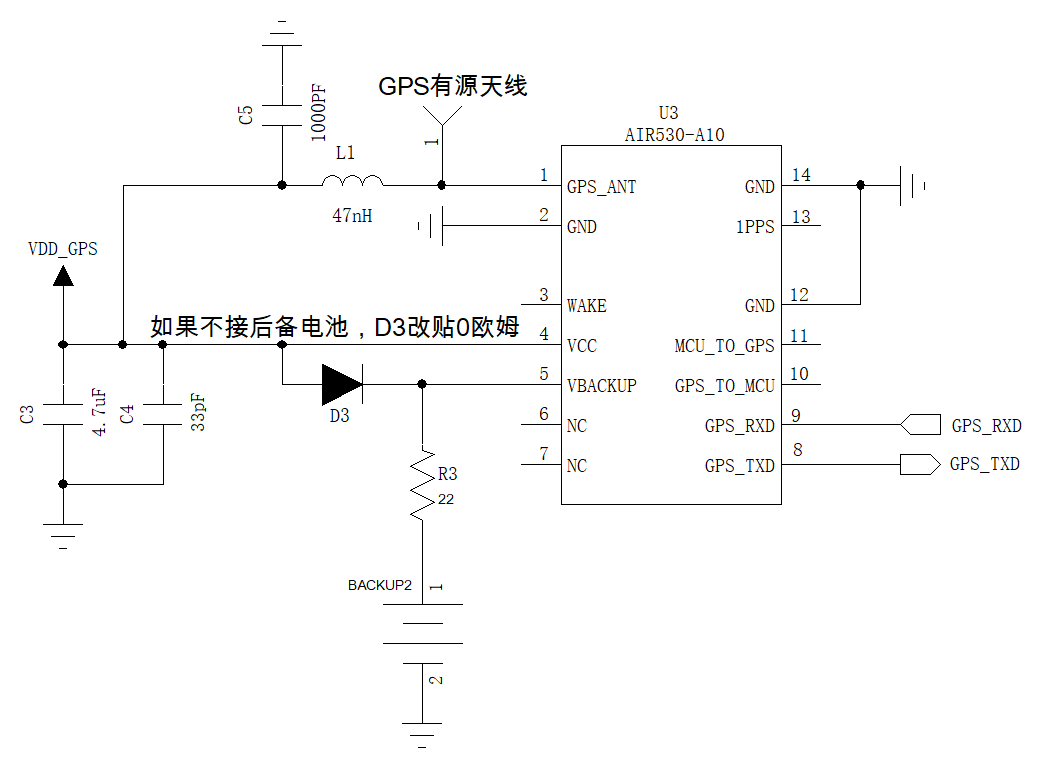
7. 模块外形尺寸
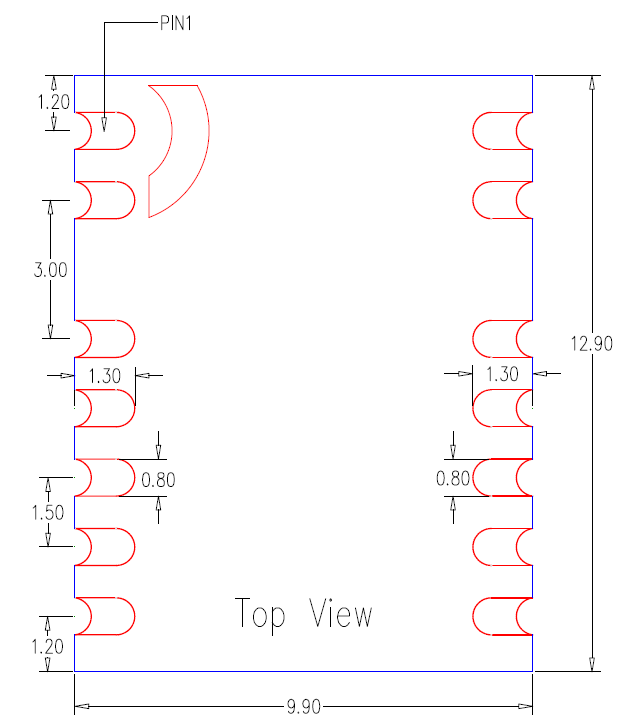
模块尺寸为12.9mm*9.9mm*2.3mm;
8. 模块推荐PCB封装尺寸图
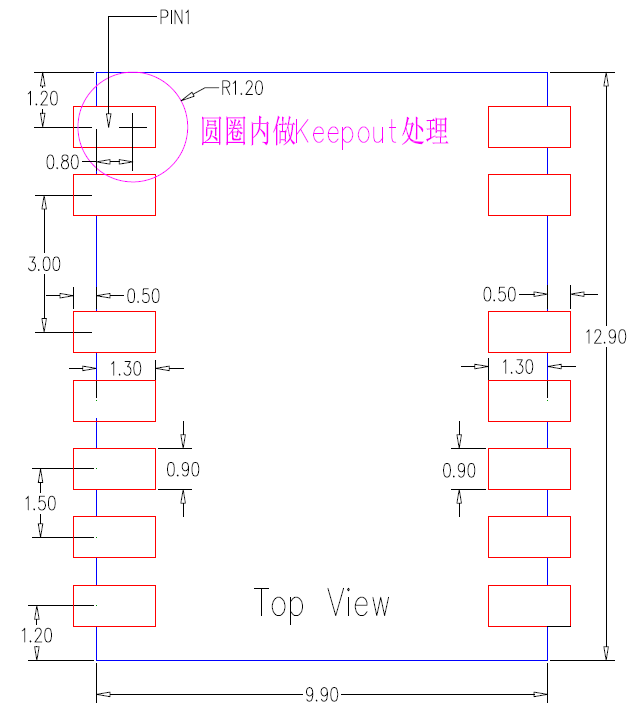
说明:
为方便邮票孔焊接,邮票孔焊盘需外延至少0.5mm,因此模块封装尺寸建议为12.9 X 10.9 mm;
模块封装下载链接如下:
Air530_原理图PCB封装.zip
9.NMEA0183协议
AIR530模块支持NMEA 0183 V4.1协议并兼容以前版本,关于NMEA 0183 V4.1的详细信息请参照NMEA 0183 V4.1官方文档。
9.1 NMEA 0183简述
GGA:时间、位置、卫星数量
GLL:经度、纬度、 UTC 时间
GSA:GPS 接收机操作模式,定位使用的卫星,DOP 值,定位状态
GSV:可见 GPS 卫星信息、仰角、方位角、信噪比
RMC:时间、日期、位置、速度
VTG:地面速度信息
9.2 Goke NMEA命令
Air530定制了一些命令用来控制冷、热、温启动和卫星定位模式等,可以直接通过串口直接发送命令来控制模块,命令格式如下:
1.启动命令
系统热启动命令:$PGKC030,1,1*2C
系统温启动命令:$PGKC030,2,1*2F
系统冷启动命令:$PGKC030,3,1*2E
系统重置冷启动:$PGKC030,4,1*29
2.卫星定位模式设置
单GPS: $PGKC115,1,0,0,0*2B
GPS+BEIDOU: $PGKC115,1,0,1,0*2A
GPS+GLONASS: $PGKC115,1,1,0,0*2A
9.2.1 GKC接口数据格式
GKC接口是用户和Air530之间进行交互的接口。其命令格式如下:
| $PGKC | Command | Arguments | ***** | CheckSum | CR | LF |
|---|
Command: 表示发送的命令号,具体的值参考下文。
Arguments: 表示发送命令需要的参数,参数可以是多个,不同的命令对应不同的数据,具体值参考下文。
***: 数据结束的标志
**CheckSum: 整条命令的校验数据
CR,LF: 包结束标志
样例数据:$PGKC030,3,1*2E
9.2.2 GKC命令
1、Command: 001
应答消息,回应对方发送的消息处理结果
Arguments:
Arg1: 该消息所应答消息的command。
Arg2: “1”,不支持接收到的消息
“2”,有效消息,但执行不正确
“3”,有效消息,并且执行正确
Example:
$PGKC001,101,3*2D<CR><LF>有效消息,并且执行正确
Example:
$PGKC001,101,3*2D<CR><LF>
2、Command: 030
系统重启命令
Arguments:
Arg1: “1”,热启动
“2”,温启动
“3”,冷启动
Arg2: “1”, 软件重启
Example:
$PGKC030,1,1*2C<CR><LF>
3、Command: 040
擦除flash中的辅助定位数据
Arguments:
无
Example:
$PGKC040*2B<CR><LF>
7、Command: 113
开启或关闭QZSS NMEA格式输出
Arguments:
Arg1: “0”,关闭
“1”,开启
Example:
$PGKC113,1*31<CR><LF>
8、Command: 114
开启或关闭QZSS 功能
Arguments:
Arg1: “0”,开启
“1”,关闭
Example:
$PGKC114,0*37<CR><LF>
9、Command: 115
设置搜星模式
Arguments:
Arg1: “1”,GPS on
“0”,GPS off
Arg2: “1”,Glonass on
“0”,Glonass off
Arg3: “1”,Beidou on
“0”,Beidou off
Arg4: “1”,Galieo on
“0”,Galieo off
Example:
$PGKC115,1,0,0,0*2B<CR><LF>
10、Command: 147
设置NMEA输出波特率
Arguments:
Arg1: 9600,19200,38400,57600,115200……921600.
Example:
$PGKC147,115200*06<CR><LF>
11、Command: 149
设置NMEA串口参数
Arguments:
Arg1: “0”,NMEA数据
“1”,Binary数据
Arg2: 9600,19200,38400,57600,115200……921600.
Example:
$PGKC149,0,38400*2C<CR><LF>
12、Command: 161
PPS设置
Arguments:
Arg1: “0”,关闭PPS输出
“1”,第一次fix
“2”,3D fix
“3”,2D/3D fix
“4”,始终开启
Arg2: PPS脉冲宽度(ms)
要求小于999
Arg3: PPS周期(ms)
要求大于PPS脉冲宽度
Example:
$PGKC161,2,500,1000*2E<CR><LF>
13、Command: 201
查询NMEA消息的间隔
Arguments:
无
Example:
$PGKC201*2C<CR><LF>
14、Command: 202
返回NMEA消息的间隔(应答201命令)
Arguments:
无
Example:
$PGKC202,1000,0,0,0,0*02<CR><LF>
15、Command: 239
开启或关闭SBAS 功能
Arguments:
Arg1: “0”,开启
“1”,关闭
Example:
$PGKC239,1*3A<CR><LF>
16、Command: 240
查询SBAS是否使能
Arguments:
无
Example:
$PGKC240*29<CR><LF>
17、Command: 241
返回SBAS是否使能(应答240命令)
Arguments:
Arg1: “0”,关闭
“1”,打开
Example:
$PGKC241,1*35<CR><LF>
18、Command: 242
设置NMEA语句输出使能
Arguments:
Arg1: GLL “0”,关闭; “1”,打开
Arg2: RMC “0”,关闭; “1”,打开
Arg3: VTG “0”,关闭; “1”,打开
Arg4: GGA “0”,关闭; “1”,打开
Arg5: GSA “0”,关闭; “1”,打开
Arg6: GSV “0”,关闭; “1”,打开
Arg7: GRS “0”,关闭; “1”,打开
Arg8: GST “0”,关闭; “1”,打开
Arg9~ Arg19: 保留
Example:
$PGKC242,1,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0*37 <CR><LF>
19、Command: 243
查询NMEA语句输出频率
Arguments:
无
Example:
$PGKC243*2A<CR><LF>
20、Command: 244
返回NMEA语句输出频率(应答243命令)
Arguments:
Args: 参考242命令
Example:
$PGKC244,1,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0*31<CR><LF>
21、Command: 278
设置RTC时间
Arguments:
Arg1: 年
Arg2: 月,1~12
Arg3: 日,1~31
Arg4: 时,0~23
Arg5: 分,0~59
Arg6: 秒,0~59
Example:
$PGKC278,2017,3,15,12,0,0*12<CR><LF>
22、Command: 279
查询RTC时间
Arguments:
无
Example:
$PGKC279*23<CR><LF>
23、Command: 280
返回NMEA语句输出频率(应答243命令)
Arguments:
Args: 参考278命令
Example:
$PGKC280,2017,3,15,12,0,0*15<CR><LF>
24、Command: 284
设置速度门限,速度低于门限值时,输出速度为0
Arguments:
Arg1: 门限值
Example:
$PGKC284,0.5*26<CR><LF>
25、Command: 356
设置HDOP门限,实际HDOP大于门限值时,不定位
Arguments:
Arg1: 门限值
Example:
$PGKC356,0.7*2A<CR><LF>
26、Command: 357
获取HDOP门限
Arguments:
无
Example:
$PGKC357*2E<CR><LF>
27、Command: 462
查询当前软件的版本号
Arguments:
无
Example:
$PGKC462*2F<CR><LF>
28、Command: 463
返回当前软件的版本号(应答462命令)
Arguments:
无
Example:
$PGKC463,GOKE9501_1.3_17101100*22<CR><LF>
29、Command: 639
设置大概的位置信息和时间信息,以加快定位速度
Arguments:
Arg1: 纬度, 例如:28.166450
Arg2: 经度, 例如:120.389700
Arg3: 高度, 例如:0
Arg4: 年
Arg5: 月
Arg6: 日
Arg7: 时,时间是UTC时间
Arg8: 分
Arg9: 秒
Example:
$PGKC639,28.166450,120.389700,0,2017,3,15,12,0*33<CR><LF>
9.2.3 支持NMEA0183协议
Air530支持NMEA0183 V4.1协议并兼容以前版本,关于NMEA0183 V4.1的详细信息可以参照NMEA 0183 V4.1官方文档。
常见输出格式如下:
GGA:时间、位置、卫星数量
GSA:GPS接收机操作模式,定位使用的卫星,DOP值,定位状态
GSV:可见GPS卫星信息、仰角、方位角、信噪比
RMC:时间、日期、位置、速度
VTG:地面速度信息
语句标识符:
| 标识符 | 含 义 |
|---|---|
| BD | BDS,北斗二代卫星系统 |
| GP | GPS |
| GL | GLONASS |
| GA | Galileo |
| GN | GNSS,全球导航卫星系统 |
GGA
$–GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh
样例数据:$GPGGA,065545.789,2109.9551,N,12023.4047,E,1,9,0.85,18.1,M,8.0,M,,*5E
| 名称 | 样例 | 单位 | 描述 |
|---|---|---|---|
| 消息ID | $GPGGA | GGA协议头 | |
| UTC时间 | 065545.789 | hhmmss.sss | |
| 纬度 | 2109.9551 | ddmm.mmmm | |
| N/S指示 | N | N=北,S=南 | |
| 经度 | 12023.4047 | dddmm.mmmm | |
| E/W指示 | E | W=西,E=东 | |
| 定位指示 | 0:未定位 1:SPS模式,定位有效 2:差分,SPS模式,定位有效 3:PPS模式,定位有效 | ||
| 卫星数目 | 9 | 范围0到12 | |
| HDOP | 0.85 | 水平精度 | |
| MSL幅度 | 18.1 | 米 | |
| 单位 | M | 米 | |
| 大地 | -2.2 | 米 | |
| 单位 | M | - | |
| 差分时间 | 8.0 | 秒 | 当没有DGPS时,无效 |
| 差分 ID | 0000 | ||
| 校验和 | *5E | ||
| 消息结束 |
GSA
$–GSA,a,a,x,x,x,x,x,x,x,x,x,x,x,x,x,x,x.x,x.x,x.x*hh
样例数据:$GPGSA,A,3,10,24,12,32,25,21,15,20,31,,,,1.25,0.85,0.91*04
| 名称 | 样例 | 单位 | 描述 |
|---|---|---|---|
| 消息ID | $GPGSA | GSA协议头 | |
| 模式1 | A | M=手动,强制在2D或3D模式 A=自动 | |
| 模式2 | 3 | 1:定位无效 2:2D定位 3:3D定位 | |
| 卫星使用 | 10 | 通道1 | |
| 卫星使用 | 24 | 通道2 | |
| 卫星使用 | 12 | 通道3 | |
| 卫星使用 | 32 | 通道4 | |
| 卫星使用 | 25 | 通道5 | |
| 卫星使用 | 21 | 通道6 | |
| 卫星使用 | 15 | 通道7 | |
| 卫星使用 | 20 | 通道8 | |
| ,,, | ,,, | ,,, | ,,, |
| 卫星使用 | 通道12 | ||
| PDOP | 1.25 | 位置精度 | |
| HDOP | 0.85 | 水平精度 | |
| VDOP | 0.91 | 垂直精度 | |
| 校验和 | *04 | ||
| 消息结束 |
GSV
$–GSV,x,x,x,x,x,x,x,…*hh
样例数据:
$GPGSV,3,1,12,14,75,001,31,32,67,111,38,31,57,331,33,26,47,221,20*73
$GPGSV,3,2,12,25,38,041,29,29,30,097,32,193,26,176,35,22,23,301,30*47
$GPGSV,3,3,12,10,20,185,28,44,20,250,,16,17,217,21,03,14,315,*7D
| 名称 | 样例 | 单位 | 描述 |
|---|---|---|---|
| 消息ID | $GPGSV | GSV协议头 | |
| 消息数目 | 3 | 范围1到4 | |
| 消息编号 | 1 | 范围1到4 | |
| 卫星数目 | 12 | ||
| 卫星ID | 14 | 范围1到32 | |
| 仰角 | 75 | 度 | 最大90° |
| 方位角 | 001 | 度 | 范围0到359° |
| 载噪比(C/No) | 31 | dBHz | 范围0到99,没有跟踪时为空 |
| 卫星 ID | 32 | 范围1到32 | |
| 仰角 | 67 | 度 | 最大90° |
| 方位角 | 111 | 度 | 范围0到359° |
| 载噪比(C/No) | 38 | dBHz | 范围0到99,没有跟踪时为空 |
| 卫星 ID | 31 | 范围1到32 | |
| 仰角 | 57 | 度 | 最大90° |
| 方位角 | 331 | 度 | 范围0到359° |
| 载噪比(C/No) | 33 | dBHz | 范围0到99,没有跟踪时为空 |
| 卫星ID | 26 | 范围1到32 | |
| 仰角 | 47 | 度 | 最大90° |
| 方位角 | 221 | 度 | 范围0到359° |
| 载噪比(C/No) | 20 | dBHz | 范围0到99,没有跟踪时为空 |
| 校验和 | *73 | ||
| 消息结束 |
RMC
$–RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxx,x.x,a*hh
样例数据:
$GPRMC,100646.000,A,3109.9704,N,12123.4219,E,0.257,335.62,291216,,,A*59
| 名称 | 样例 | 单位 | 描述 |
|---|---|---|---|
| 消息ID | $GPRMC | RMC协议头 | |
| UTC时间 | 100646.000 | hhmmss.ss | |
| 状态 | A | A=数据有效;V=数据无效 | |
| 纬度 | 2109.9704 | ddmm.mmmm | |
| N/S指示 | N | N=北,S=南 | |
| 经度 | 11123.4219 | dddmm.mmmm | |
| E/W指示 | E | W=西,E=东 | |
| 地面速度 | 0.257 | Knot(节) | |
| 方位 | 335.62 | 度 | |
| 日期 | 291216 | ddmmyy | |
| 磁变量 | - | ||
| 校验和 | *59 | ||
| 消息结束 |
VTG
$–VTG,x.x,T,x.x,M,x.x,N,x.x,K*hh
样例数据:$GPVTG,335.62,T,,M,0.257,N,0.477,K,A*38
| 名称 | 样例 | 单位 | 描述 |
|---|---|---|---|
| 消息ID | $GPVTG | VTG协议头 | |
| 方位 | 335.62 | 度 | |
| 参考 | T | True | |
| 方位 | 335.62 | 度 | |
| 参考 | M | Magnetic | |
| 速度 | 0.257 | Knot(节) | |
| 单位 | N | 节 | |
| 速度 | 0.477 | 公里/小时 | |
| 单位 | K | 公里/小时 | |
| 单位 | A | 定位系统模式指示: A—自主模式; D—差分模式; E—估算(航位推算)模式; M—手动输入模式; S—模拟器模式; N—数据无效。 | |
| 校验和 | *10 | ||
| 消息结束 |
GNSS工具naviTrack
naviTrack是一个专为Air530开发的GNSS工具,它为用户评估、控制Air530模块提供了一个易用、强大的可视化PC端工具。当然用户也可以使用诸如u-Center、PowerGPS等工具。
