串口¶
作者:陈之敏 时间:2020年08月15日 关键字:csdk、RDA8910、二次开发、UART ## 目录
最近听说有的小伙伴看了我的教程后,有一些问题都跑到官方的gitee上面去问去了。导致官方的人没搞懂问的是啥,小伙伴们也没能知道自己想要的答案。给大家造成了困扰,这里我说声抱歉。
既然出现了这个问题,我这里就声明一下,本系列教程所涉及的内容(demo)不是官方的作品。我个人觉得官方的demo内容太多太全,往往都是把一个模块内所有的东西全部放在一起。这样的话对新手不是很友好,阅读起来也比较费劲。我就把官方的部分demo进行相关的简化,并推出教程这样的话可能会对新手朋友们有一定的帮助。
有时候周末闲暇时间我也会加上一些我觉得好玩的模块在里面,这些可能在官方的demo都没有,比如cJSON、PAHO-MQTT、http-client。
这就是官方的代码仓库。
git clone --recursive https://gitee.com/openLuat/Luat_CSDK_Air724U.git
当然各位小伙伴在看本教程时,我建议还是使用我下面提供的仓库比较好,看完之后在迁移到官方的仓库⇧。
git clone --recursive https://gitee.com/chenxiahuaxu/RDA8910_CSDK.git
再看本教程过程中如果遇到了问题,可以在本人的代码仓库下面评论。也可以在本人的博客下面评论。我要是看到的话,并且这个问题在我的能力范围的话我会尽力解答的(非官方,不要对我要求太多哦,要求太多我可能就不管啦)。
一、前言¶
串行接口简称串口,也称串行通信接口或串行通讯接口,是采用串行通信方式的扩展接口。串行接口 (Serial Interface)是指数据一位一位地顺序传送。其特点是通信线路简单,只要一对传输线就可以实现双向通信(可以直接利用电话线作为传输线),从而大大降低了成本,特别适用于远距离通信,但传送速度较慢。
串口通讯协议简介
串口通讯(Serial Communication)是一种设备间非常常用的串行通讯方式,因为它简单便捷,大部分电子设备都支持该通讯方式,电子工程师在调试设备时也经常使用该通讯方式输出调试信息,因为Air724U自有一个USB端口用于程序下载和log打印,所以这里主要是讲怎么和其他的单片机或者通讯,不建议用来打印调试信息。 * 串口通讯的波特率
串口通讯是一种异步通信,异步通讯中由于没有时钟信号,所以两个通讯设备之间需要约定好波特率,即每个码元的长度,以便对信号进行解码。常见的波特率为9600、19200、115200等。
通讯的起始和停止信号
串口通讯的一个数据包从起始信号开始,直到停止信号结束。数据包的起始信号由一个逻辑 0的数据位表示,而数据包的停止信号可由 0.5、1、1.5或 2 个逻辑 1 的数据位表示,只要双方约定一致即可。
数据位长度
在数据包的起始位之后紧接着的就是要传输的主体数据内容,也称为有效数据,有效数据的长度常被约定为 5、6、7或 8位长。
数据校验
在有效数据之后,有一个可选的数据校验位。由于数据通信相对更容易受到外部干扰导致传输数据出现偏差,可以在传输过程加上校验位来解决这个问题。校验方法有奇校验(odd)、偶校验(even)、0校验(space)、1校验(mark)以及无校验(noparity)。在无校验的情况下,数据包中不包含校验位。
以上内容引用开源一小步的ESP32的两个UART实验有兴趣的自行了解
二、开发板硬件部分¶
翻看数据手册,发现芯片一共具有五个串口,其中串口1还具有硬件流控的功能。我们所熟悉的stm32串口一键下载电路就是通过流控来控制开发板进入下载模式。
2.1、UART1/UART2¶
我所选用的开发板,预留了一个用于串口通讯的usb口。通过如下图所示的开关,进行串口1和串口2的切换。


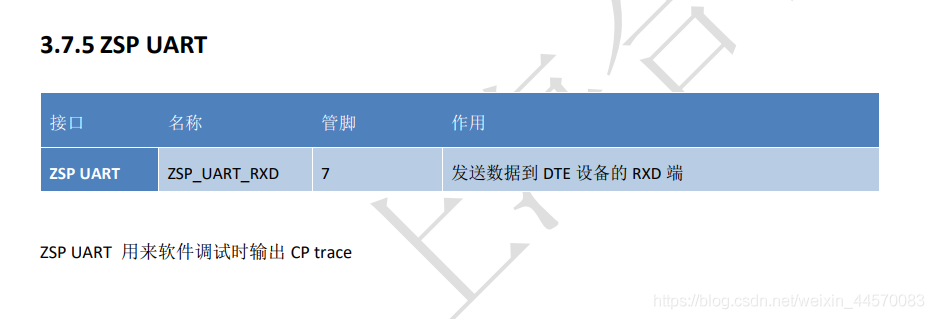
 ### 2.2、UART3/Host UART/ZSP
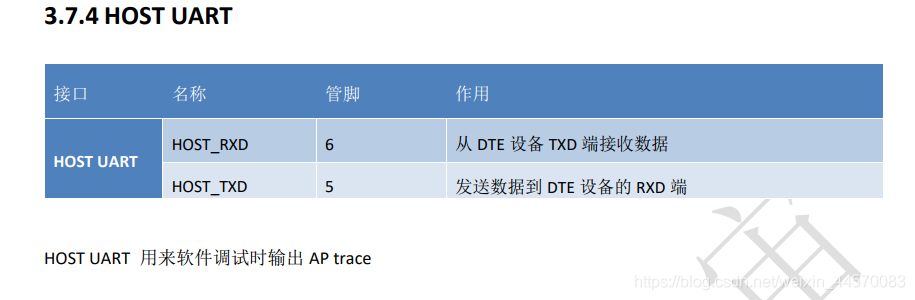
UART 这三个串口官方将其全部引出,从模块背面就能看到引脚位置。
### 2.2、UART3/Host UART/ZSP
UART 这三个串口官方将其全部引出,从模块背面就能看到引脚位置。 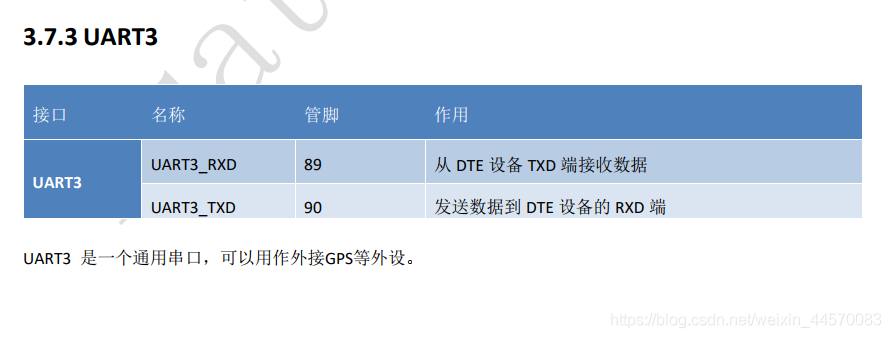 串口3官方将其引出。
串口3官方将其引出。 

2.3、电平转化¶
需要注意如果使用Air724U的串口和其他的单片机进行通讯,需要进行电平转换,不可直接与其他单片机相连。 官方给出了一个电平转化电路的参考电路。
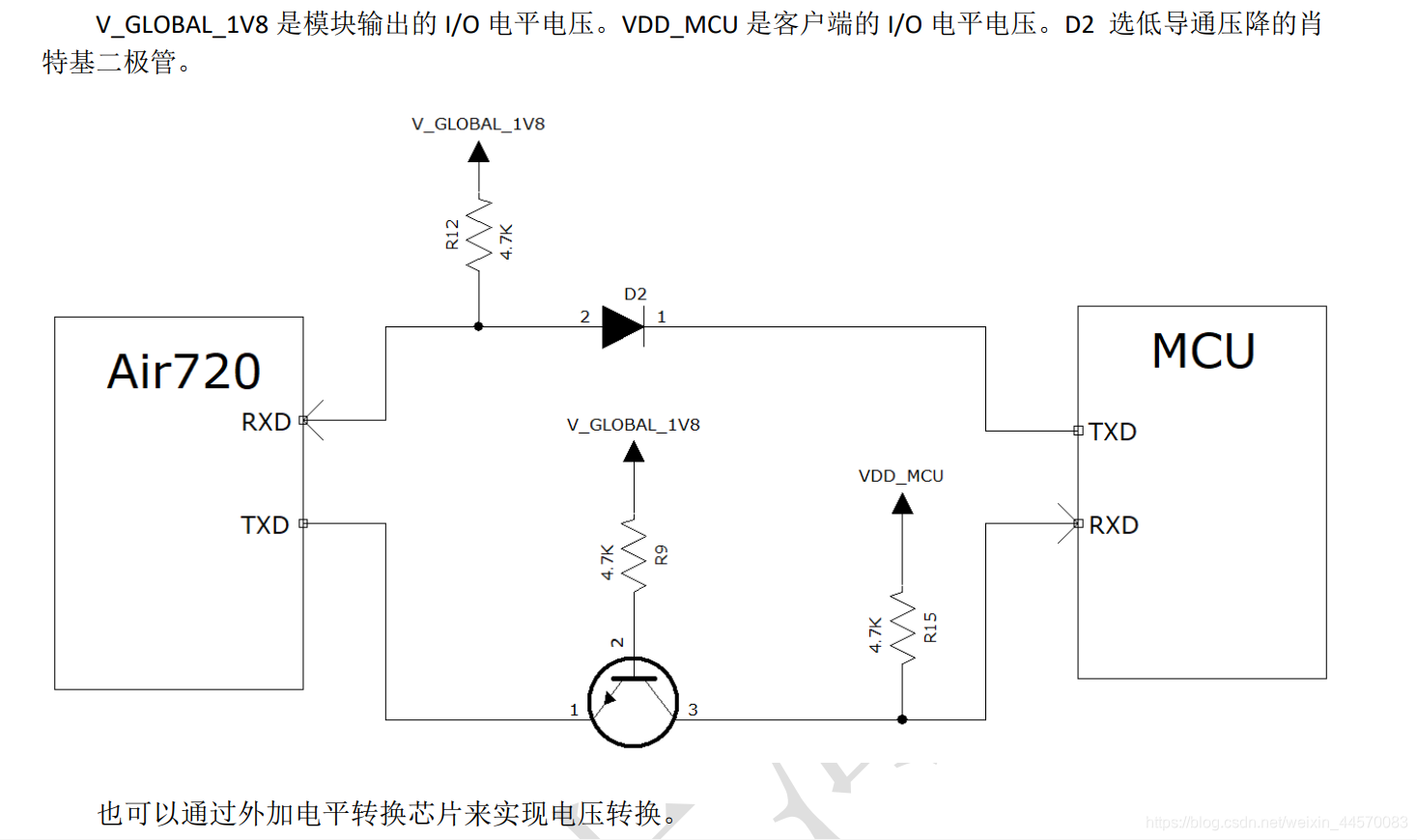 首先看第一条线路,MCU发送,Air720接收这一条线路。当MCU的TXD引脚输出高电平时,二极管D2截止,Air720的RXD引脚被1.8v电源拉高。当MCU的TXD引脚输出低电平时,二极管D2导通,Air720的RXD引脚直接接入MCU的TXD引脚。这样就能确保Air720能够接收到MCU发出的高低电平信号,并且输入的高电平不会高于1.8V。
首先看第一条线路,MCU发送,Air720接收这一条线路。当MCU的TXD引脚输出高电平时,二极管D2截止,Air720的RXD引脚被1.8v电源拉高。当MCU的TXD引脚输出低电平时,二极管D2导通,Air720的RXD引脚直接接入MCU的TXD引脚。这样就能确保Air720能够接收到MCU发出的高低电平信号,并且输入的高电平不会高于1.8V。
然后看第二条线路,MCU接收,Air720发送这一条线路。当Air的TXD引脚输出高电平时,三极管截止,MCU的RXD引脚被VDD_MCU电源拉高。当Air的TXD引脚输出低电平时,三极管导通,MCU的RXD引脚直接接入Air的TXD引脚。这样就能确保MCU能够接收到Air发出的高低电平信号,并且输入的高电平能够符合MCU的VDD电平需求。
有人可能会讲第二条线路为什么不用一个二极管,直接和第一条线路的参考电路一致。本电路适用于MCU的VDD>1.8v。当第二条线路使用二极管时,如果MCU的VDD大于1.8v,当Air输出高电平时也就是1.8v,此时二极管两端仍会存在压降,二极管并不会截止,MCU的RXD就不会被有效的拉高。此时Air发出的高电平部分会丢失,并且Air的TXD引脚会接入更高的电压,一旦超过耐压值。严重会导致Air引脚损坏。
三、编写测试程序¶
3.1、了解本例程所用到的函数¶
使用串口的驱动需要包含#include "iot_uart.h"头文件,我们这里只用到了五个函数,分别是:
>/打开uart @param port: UART 编号@param cfg: 配置信息 @return TRUE:
成功 FALSE: 失败/
BOOL
iot_uart_open(E_AMOPENAT_UART_PORT port,T_AMOPENAT_UART_PARAM *cfg)
UINT32
iot_uart_read(E_AMOPENAT_UART_PORT port,UINT8* buf,UINT32 bufLen, UINT32 timeoutMs)
/写uart @param port: UART 编号@param buf: 写入数据地址 @param bufLen: 写入数据长度@return UINT32: 实际读取长度/
UINT32
iot_uart_write(E_AMOPENAT_UART_PORT port, UINT8* buf,UINT32 bufLen)
3.2、编写主程序¶
主程序里主要做了两件事,就是分别对串口1和串口2进行初始化,两者参数完全一致,唯一一个不同的地方就是两者的消息回调函数不一样。
T_AMOPENAT_UART_PARAM uartCfg = {0};
BOOL err = 0;
uartCfg.baud = OPENAT_UART_BAUD_115200; //波特率
uartCfg.dataBits = 8; //数据位
uartCfg.stopBits = 1; // 停止位
uartCfg.parity = OPENAT_UART_NO_PARITY; // 无校验
uartCfg.flowControl = OPENAT_UART_FLOWCONTROL_NONE; //无流控
uartCfg.txDoneReport = FALSE; //发送完成不通知
uartCfg.uartMsgHande = uart1_recv_handle; //回调函数
err = iot_uart_open(OPENAT_UART_1, &uartCfg); //初始化串口1
while (!err)
{
iot_debug_print("OPENAT_UART_1 open FALSE");
iot_os_sleep(1000);
}
uartCfg.uartMsgHande = uart2_recv_handle; //回调函数
err = iot_uart_open(OPENAT_UART_2, &uartCfg); //初始化串口2
while (!err)
{
iot_debug_print("OPENAT_UART_2 open FALSE");
iot_os_sleep(1000);
}
3.3、编写消息回调函数¶
回调函数中做的事情也很简单,主要是将接收到的数据,进行格式化后再通过串口发送出去。只有一个要注意的地方就是调用iot_uart_read读取消息后,需要根据接收到的数据长度,在缓存区末尾加上\0。
uint8 *recv_buff = NULL;
uint8 dataLen = evt->param.dataLen;
if (dataLen)
{
if (evt->evtId = OPENAT_DRV_EVT_UART_RX_DATA_IND)
{
recv_buff = iot_os_malloc(dataLen);
if (recv_buff == NULL)
{
iot_debug_print("uart1_recv_handle_0 recv_buff malloc fail %d", dataLen);
}
uint8 len = iot_uart_read(OPENAT_UART_1, recv_buff, dataLen, 25);
recv_buff[len] = '\0';
if (len)
{
char buf[100] = {0};
sprintf(buf, "uart1 recv dadalen:%d,data:%s\r\n", len, recv_buff);
iot_debug_print(buf);
iot_uart_write(OPENAT_UART_1, buf, strlen(buf));
}
//使用完必须释放,不然会造成堆区内存泄漏,久而久之内存就不够用了。
iot_os_free(recv_buff);
}
}
三、编译并下载程序¶
完整代码在这,自取。
/*
* @Author: your name
* @Date: 2020-05-19 14:05:32
* @LastEditTime: 2020-05-22 19:35:50
* @LastEditors: Please set LastEditors
* @Description: In User Settings Edit
* @FilePath: \RDA8910_CSDK\USER\user_main.c
*/
#include "string.h"
#include "cs_types.h"
#include "osi_log.h"
#include "osi_api.h"
#include "am_openat.h"
#include "am_openat_vat.h"
#include "am_openat_common.h"
#include "iot_debug.h"
#include "iot_uart.h"
#include "iot_os.h"
#include "iot_gpio.h"
#include "iot_pmd.h"
#include "iot_adc.h"
#include "iot_vat.h"
void uart1_recv_handle(T_AMOPENAT_UART_MESSAGE *evt)
{
uint8 *recv_buff = NULL;
uint8 dataLen = evt->param.dataLen;
if (dataLen)
{
if (evt->evtId = OPENAT_DRV_EVT_UART_RX_DATA_IND)
{
recv_buff = iot_os_malloc(dataLen);
if (recv_buff == NULL)
{
iot_debug_print("uart1_recv_handle_0 recv_buff malloc fail %d", dataLen);
}
uint8 len = iot_uart_read(OPENAT_UART_1, recv_buff, dataLen, 25);
recv_buff[len] = '\0';
if (len)
{
char buf[100] = {0};
sprintf(buf, "uart1 recv dadalen:%d,data:%s\r\n", len, recv_buff);
iot_debug_print(buf);
iot_uart_write(OPENAT_UART_1, buf, strlen(buf));
}
//使用完必须释放,不然会造成堆区内存泄漏,久而久之内存就不够用了。
iot_os_free(recv_buff);
}
}
}
void uart2_recv_handle(T_AMOPENAT_UART_MESSAGE *evt)
{
uint8 *recv_buff = NULL;
uint8 dataLen = evt->param.dataLen;
if (dataLen)
{
if (evt->evtId = OPENAT_DRV_EVT_UART_RX_DATA_IND)
{
recv_buff = iot_os_malloc(dataLen);
if (recv_buff == NULL)
{
iot_debug_print("uart1_recv_handle_0 recv_buff malloc fail %d", dataLen);
}
uint8 len = iot_uart_read(OPENAT_UART_2, recv_buff, dataLen, 25);
recv_buff[len] = '\0';
if (len)
{
char buf[100] = {0};
sprintf(buf, "uart2 recv dadalen:%d,data:%s\r\n", len, recv_buff);
iot_debug_print(buf);
iot_uart_write(OPENAT_UART_2, buf, strlen(buf));
}
//使用完必须释放,不然会造成堆区内存泄漏,久而久之内存就不够用了。
iot_os_free(recv_buff);
}
}
}
//main函数
int appimg_enter(void *param)
{
//系统休眠
iot_os_sleep(10000);
T_AMOPENAT_UART_PARAM uartCfg = {0};
BOOL err = 0;
uartCfg.baud = OPENAT_UART_BAUD_115200; //波特率
uartCfg.dataBits = 8; //数据位
uartCfg.stopBits = 1; // 停止位
uartCfg.parity = OPENAT_UART_NO_PARITY; // 无校验
uartCfg.flowControl = OPENAT_UART_FLOWCONTROL_NONE; //无流控
uartCfg.txDoneReport = FALSE; //发送完成不通知
uartCfg.uartMsgHande = uart1_recv_handle; //回调函数
err = iot_uart_open(OPENAT_UART_1, &uartCfg); //初始化串口1
while (!err)
{
iot_debug_print("OPENAT_UART_1 open FALSE");
iot_os_sleep(1000);
}
uartCfg.uartMsgHande = uart2_recv_handle; //回调函数
err = iot_uart_open(OPENAT_UART_2, &uartCfg); //初始化串口2
while (!err)
{
iot_debug_print("OPENAT_UART_2 open FALSE");
iot_os_sleep(1000);
}
//创建一个任务
//iot_os_create_task(TestTask, NULL, 4096, 1, OPENAT_OS_CREATE_DEFAULT, "TestTask");
return 0;
}
//退出提示
void appimg_exit(void)
{
OSI_LOGI(0, "application image exit");
}
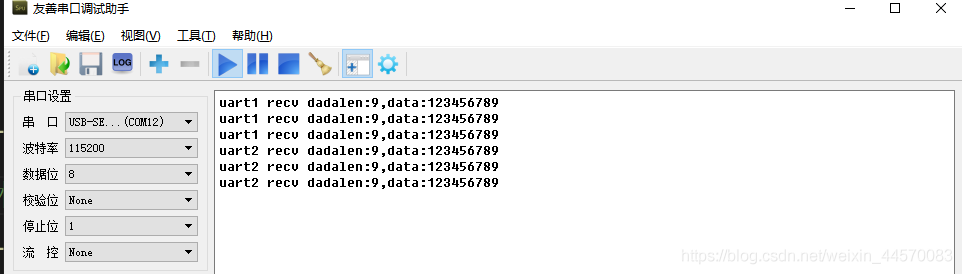
查看输出,串口1和串口2都成功的接收到了正确的数据,并且成功格式化输出。
不会下载的点击这里,进去查看我的
RDA8910 CSDK二次开发入门教程专题第一篇博文1、RDA8910CSDK二次开发:环境搭建里面讲了怎么下载 这里只是我的学习笔记,拿出来给大家分享,欢迎大家批评指正,本篇教程到此结束